Motivation
研究内容1:基于关联感知的4D毫米波雷达点云的3D目标检测算法
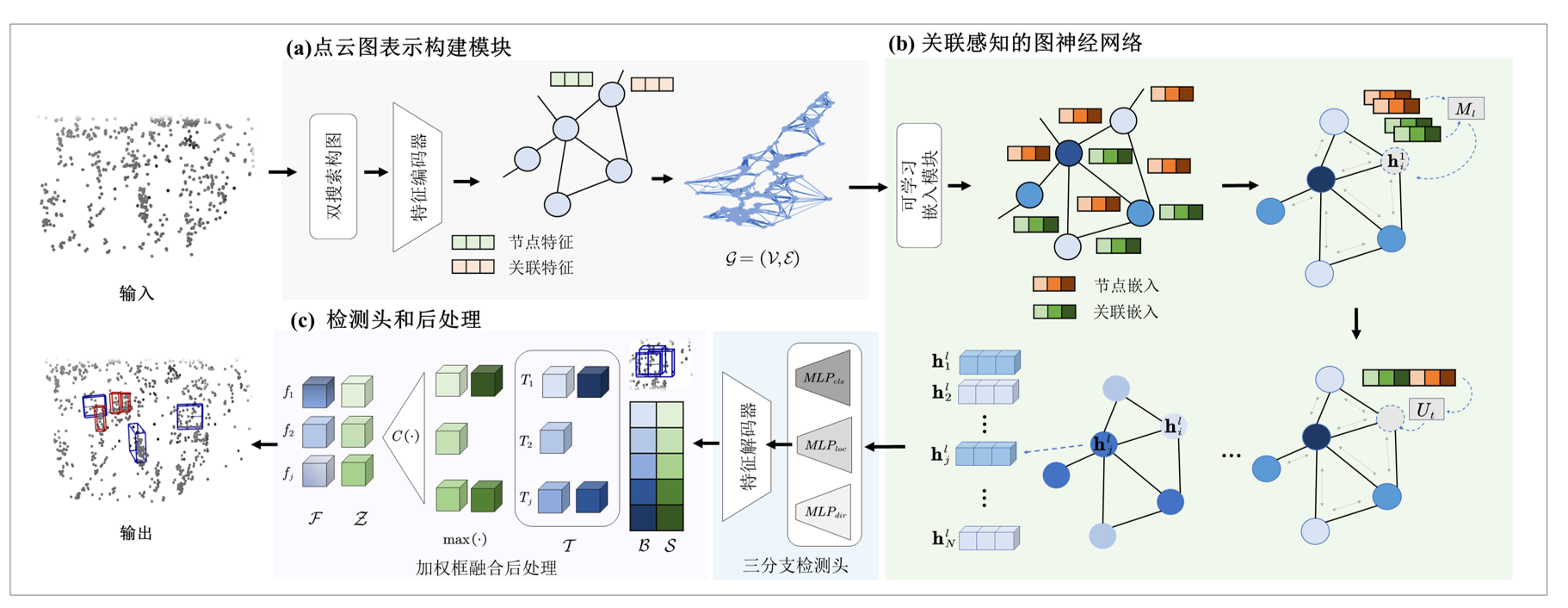
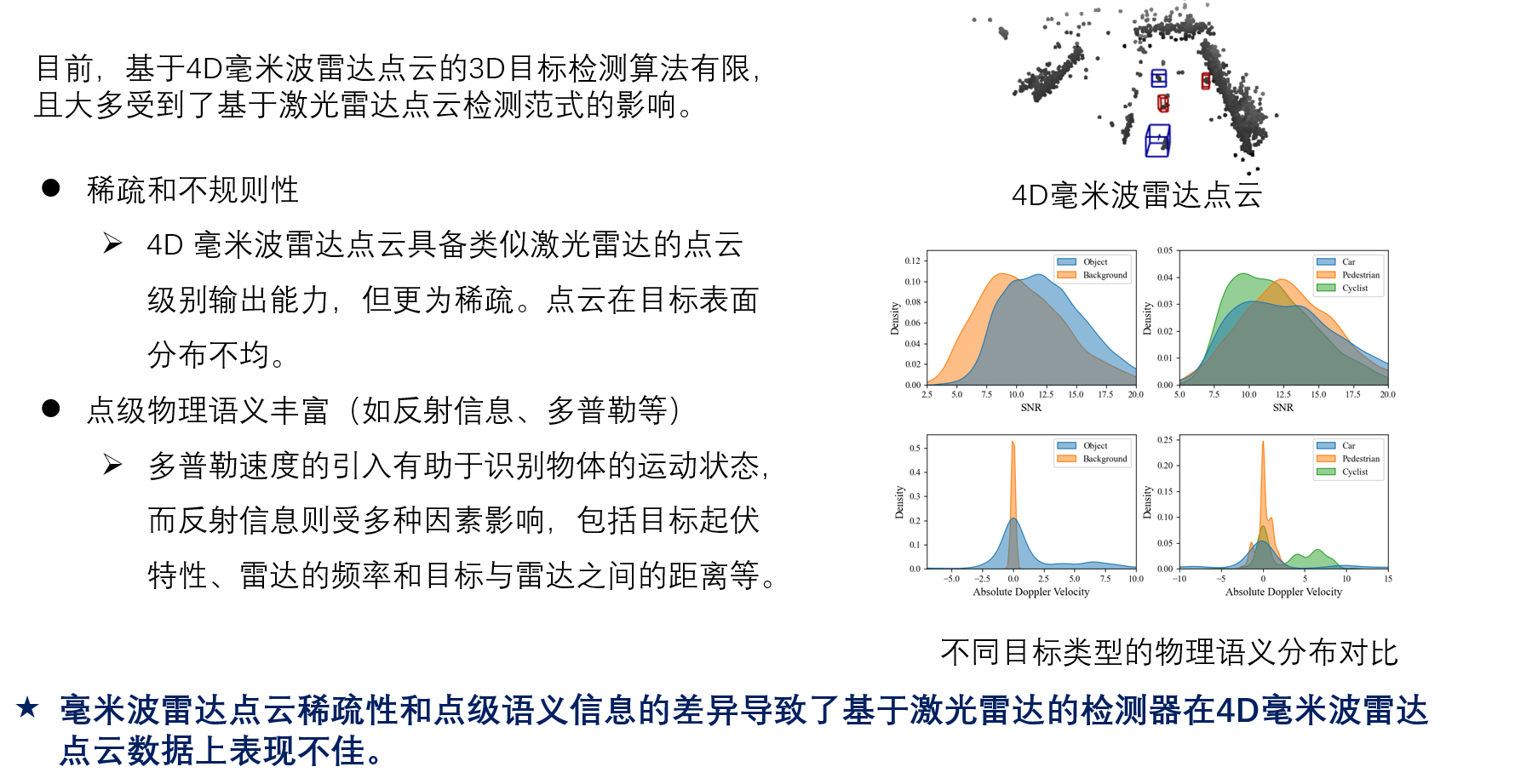
- 鉴于现有工作在捕捉雷达点云物理语义关联上的局限, 我们提出可学习的局部关联表示, 增强点云之间的信息流; 引入节点-关系融合感知机制, 解决现有方案对局部变换敏感的问题。
- 本算法填补了 graph-based 方案在 4D 成像雷达目标检测上的空白, 相比基准模型在 4D 雷达数据集上提升了 21%mAP,比肩雷达点云和摄像头融合算法。
基于图神经网络的毫米波雷达点云的 3D 目标检测方法( 202311490730.X)
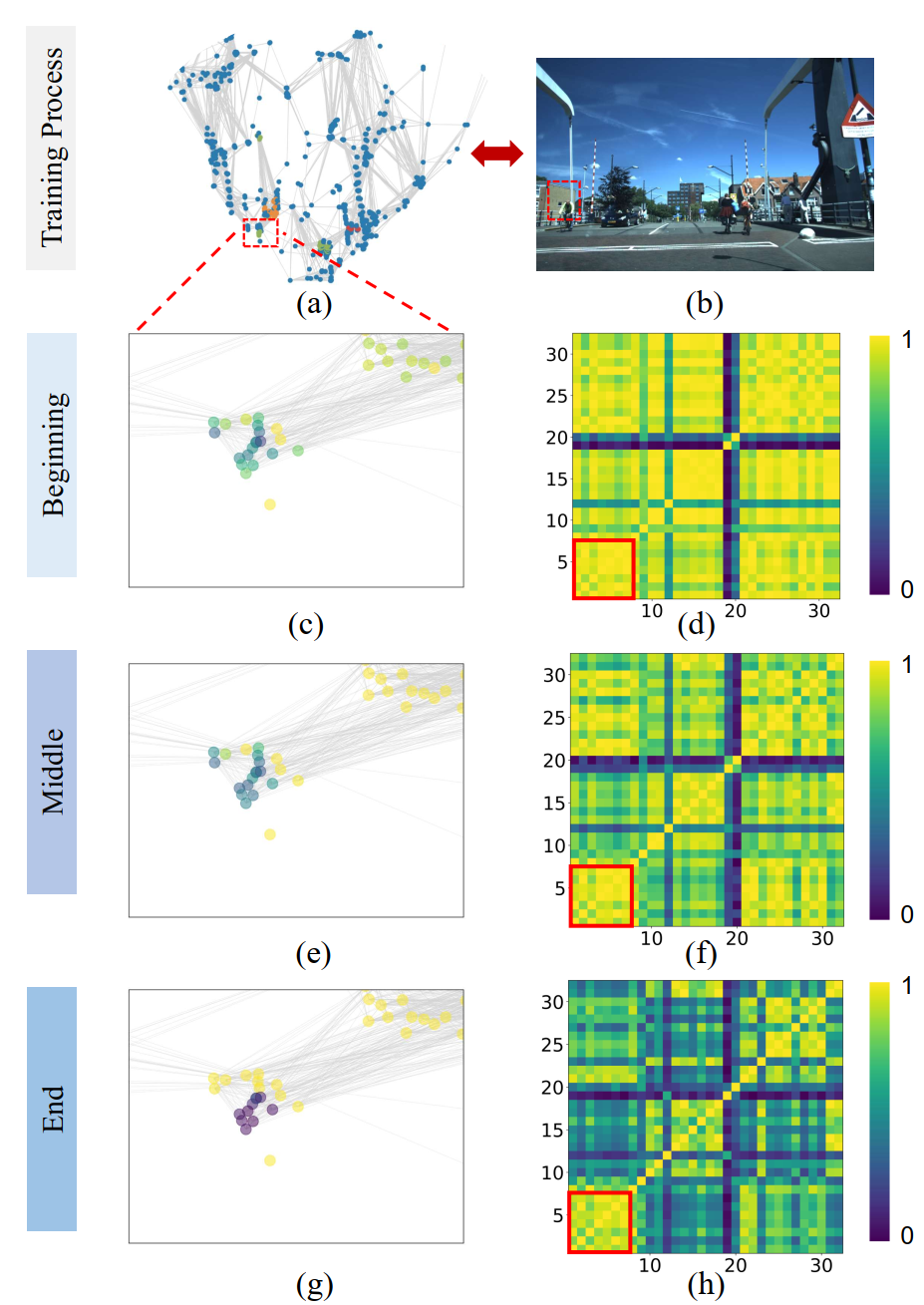
对关联感知机制的探索:
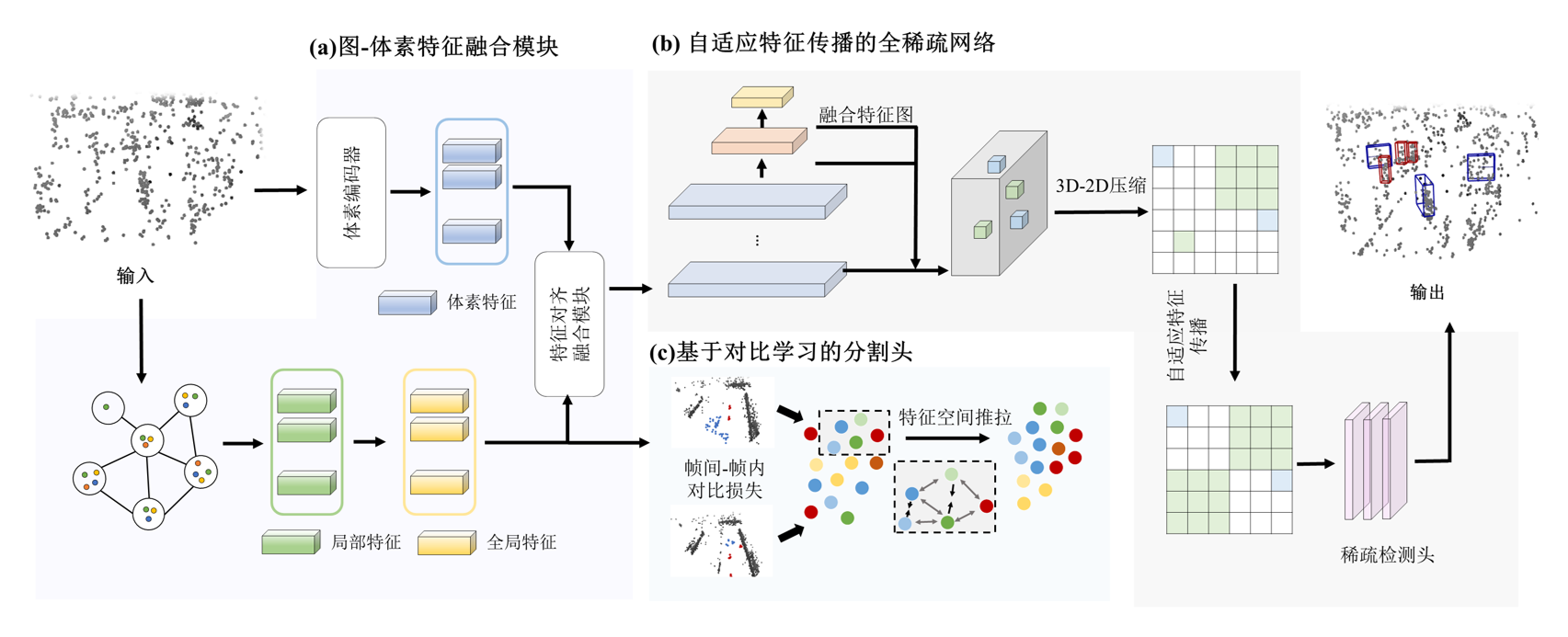
研究内容2:基于对比学习的全稀疏4D毫米波雷达点云的3D目标检测算法
引入帧内和帧间的对比学习,以捕捉毫米波雷达点云样本之间的全局语义关联。
为提高处理速度和减少稠密计算资源在稀疏数据上的浪费,设计自适应特征传播的全稀疏网络,实现直接由体素到物体的直接检测。
结果: